 |
|
Reconstructing 3D Textures:
This radial imaging system includes a cylindrical mirror and can be used to recover the geometry of a 3D texture. In a single image, the system captures the scene from a circular loci of viewpoints in addition to the real viewpoint of the camera.
|
 |
|
Captured Images of 3D Textures:
Images of 3D textures -- the bark of a tree and a slice of bread -- captured by the radial imaging system shown above. Points on the 3D texture are imaged at least twice. In a radial imaging system, the epipolar lines are radial and hence scan-line matching ambiguities
do not arise as in the case of conventional rectified stereo systems. Thus, the geometry of the object is more robustly recovered.
|
 |
|
Reconstructed 3D Textures:
Views of the geometry of 3D Textures recovered from the captured images shown above.
|
|
 |
|
Sampling and Estimating BRDFs:
This radial imaging system includes a cylindrical mirror and can be used to sample the BRDF of an isotropic material by taking only one image. The
sample is placed at a specific distance along the optical axis of the system. Multiple internal reflections within the cylindrical mirror
cause the sample to be observed by four circular loci of virtual viewpoints, in addition to the real viewpoint of the camera.
|
 |
|
Captured Images of Paint Samples:
Images of small circular disks painted with metallic and red satin paints,
captured by the system shown above.
One can see that via reflections the samples are
imaged along four circles, implying that the samples are
imaged by four circular loci of viewpoints. The measurements for these viewing directions
and a single lighting direction are used to fit an analytic isotropic BRDF model to the samples.
|
 |
|
Rendering with the Estimated BRDFs:
The Buddha model rendered with the analytic BRDF model parameters for metallic
and red satin paints estimated from the captured images shown above.
|
|
 |
|
Reconstructing Faces:
This radial imaging system includes a conical mirror and can be used to recover the geometry of a face by capturing
just a single image. The system captures the scene from a circular loci of viewpoints in addition to
the camera's real viewpoint.
|
 |
|
Captured Images of Faces:
Images of faces captured by the above radial imaging system. Since points on a face are imaged at least twice,
along a radial line, we can apply stereo to recover face geometry.
|
 |
|
Reconstructed Face Models:
Views of the face models reconstructed from the captured images shown above.
Interactive Flash Demonstration
|
 |
|
Capturing Complete Texture Maps of Convex Objects:
This radial imaging system includes a conical mirror and can be used to capture the complete texture map
of a convex object in a single image. (Sometimes the bottom surface might not be imaged).
This system images the scene from a circular loci of viewpoints in addition to
the camera's real viewpoint.
|
 |
|
Captured Images:
Images of a conical and cylindrical object captured by the system shown above. The top and all sides of each object
are captured in just one image. These images can now be used as texture maps.
|
 |
|
Using Captured Images as Texture Maps:
A conical and a cylindrical object texture mapped with the captured images shown above.
|
 |
|
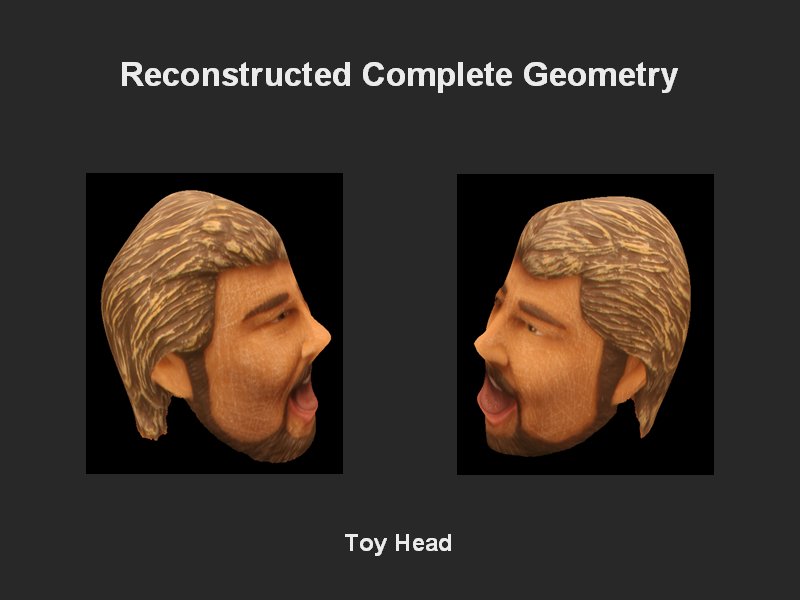
Recovering Complete Geometry of Convex Objects:
Images of a toy head captured by the radial
imaging system shown above, that includes a conical mirror. The object was moved along the optical axis in
between the two images. The complete head is seen in each of the two
images. Due to the specific motion of the object, the epipolar lines for these two images are radial. Hence, we can
use stereo to recover the complete geometry of the toy head. |
 |
|
Reconstructed Complete Geometry:
Views of the complete geometry of the toy head recovered from the two captured images shown above. |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}